



02. ข้อดีของแพลตฟอร์ม HIL คืออะไร?
ในเมื่อสามารถทำการทดสอบกับรถยนต์จริงได้ ทำไมจึงต้องใช้แพลตฟอร์ม HIL ในการทดสอบ?
การประหยัดต้นทุน:
การใช้แพลตฟอร์ม HIL สามารถลดเวลา กำลังคน และค่าใช้จ่ายได้ การทดสอบบนถนนสาธารณะหรือถนนปิดมักต้องเสียค่าใช้จ่ายจำนวนมาก เวลาและค่าใช้จ่ายในการดัดแปลงหรือซ่อมแซมฮาร์ดแวร์และซอฟต์แวร์ในรถทดสอบนั้นไม่ควรมองข้าม การทดสอบรถจริงต้องใช้ช่างเทคนิคหลายคน (ผู้ประกอบชิ้นส่วน คนขับ วิศวกรไฟฟ้า ฯลฯ) คอยเตรียมพร้อมรับมือกับปัญหาใดๆ ที่เกิดขึ้นระหว่างการทดสอบ แต่ด้วยการทดสอบบนแพลตฟอร์ม HIL เนื้อหาการทดสอบส่วนใหญ่สามารถทำได้ในห้องปฏิบัติการ และส่วนติดต่อผู้ใช้ของแพลตฟอร์ม HIL ช่วยให้สามารถปรับเปลี่ยนพารามิเตอร์ต่างๆ ของวัตถุที่ควบคุมได้แบบเรียลไทม์ โดยไม่ต้องทำการถอดประกอบและประกอบรถใหม่ให้ยุ่งยาก
การลดความเสี่ยง:
ในระหว่างการทดสอบใช้งานจริงของยานพาหนะ มีความเสี่ยงที่จะเกิดอุบัติเหตุทางจราจร ไฟฟ้าช็อต และความล้มเหลวทางกลไกเมื่อตรวจสอบสภาวะอันตรายและรุนแรง การใช้แพลตฟอร์ม HIL สำหรับการทดสอบเหล่านี้สามารถปกป้องบุคลากรและทรัพย์สินได้อย่างมีประสิทธิภาพ ช่วยให้การทดสอบความเสถียรและความปลอดภัยของระบบภายใต้สภาวะรุนแรงเป็นไปอย่างครอบคลุม และแสดงให้เห็นถึงข้อดีที่ชัดเจนในการพัฒนาหรือปรับปรุงตัวควบคุม
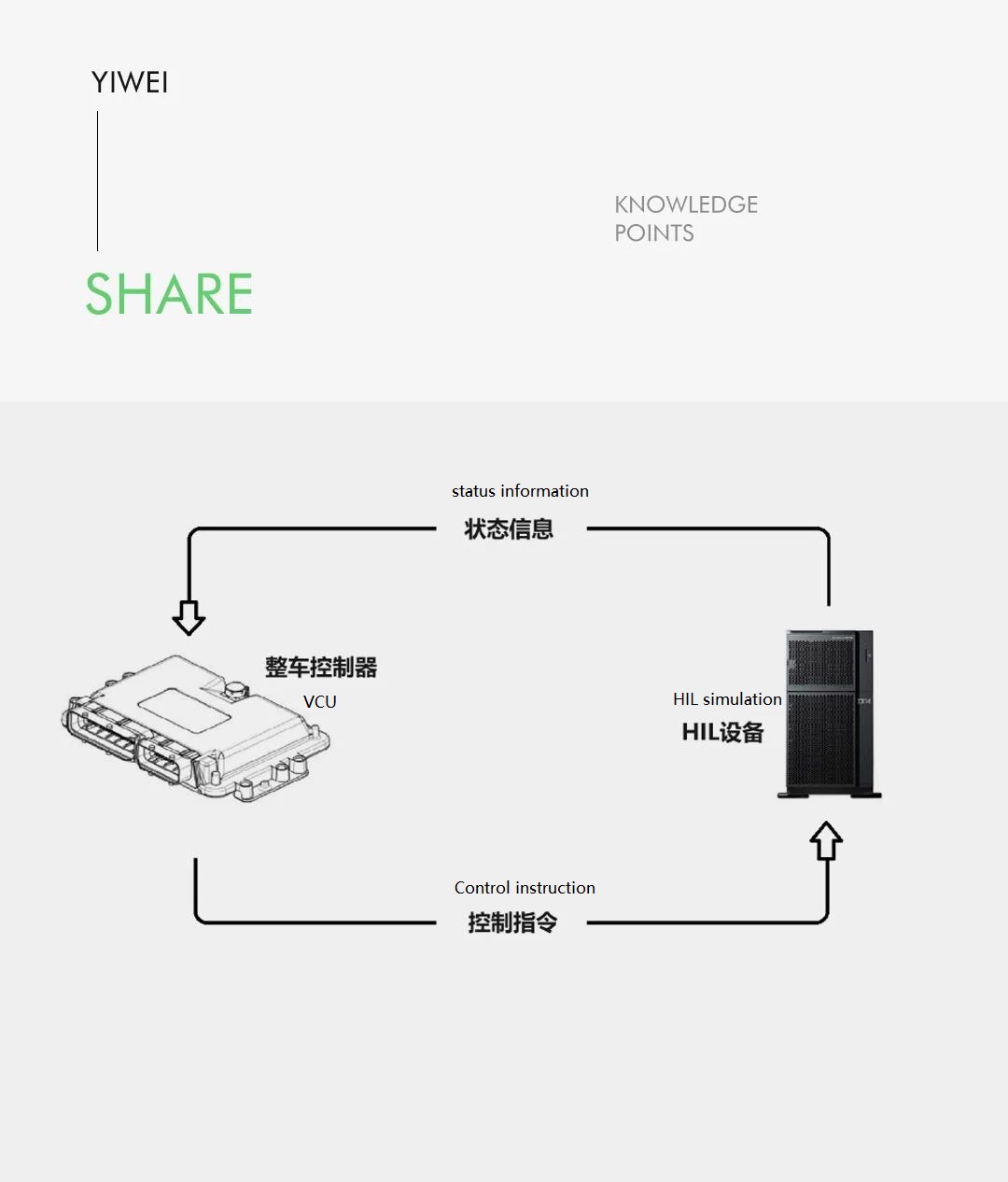
การพัฒนาที่ประสานกัน:
ในระหว่างการพัฒนาโครงการใหม่ ตัวควบคุมและวัตถุที่ถูกควบคุมมักจะถูกพัฒนาไปพร้อม ๆ กัน อย่างไรก็ตาม หากไม่มีวัตถุที่ถูกควบคุม การทดสอบตัวควบคุมจะสามารถเริ่มต้นได้ก็ต่อเมื่อการพัฒนาวัตถุที่ถูกควบคุมเสร็จสมบูรณ์แล้วเท่านั้น หากมีแพลตฟอร์ม HIL ให้ใช้งาน ก็สามารถจำลองวัตถุที่ถูกควบคุมได้ ทำให้การทดสอบตัวควบคุมสามารถดำเนินต่อไปได้
การจัดการข้อผิดพลาดเฉพาะ:
ในการทดสอบรถยนต์จริง มักเป็นเรื่องยากที่จะจำลองข้อผิดพลาดบางอย่าง เช่น ความเสียหายของฮาร์ดแวร์หรือไฟฟ้าลัดวงจร และอาจมีความเสี่ยงที่เกี่ยวข้อง การใช้ส่วนต่อประสานการทำงานของแพลตฟอร์ม HIL ช่วยให้สามารถจำลองข้อผิดพลาดแต่ละรายการหรือหลายรายการได้ ทำให้สามารถทดสอบได้อย่างมีประสิทธิภาพว่าตัวควบคุมจัดการกับข้อผิดพลาดประเภทต่างๆ อย่างไร
03 วิธีดำเนินการทดสอบแพลตฟอร์ม HIL อย่างไร?
การตั้งค่าแพลตฟอร์ม:
การจัดตั้งแพลตฟอร์มประกอบด้วยการสร้างแพลตฟอร์มทั้งซอฟต์แวร์และฮาร์ดแวร์ สำหรับการทดสอบยานยนต์ แพลตฟอร์มซอฟต์แวร์เกี่ยวข้องกับการสร้างแบบจำลองสถานการณ์การทดสอบ แบบจำลองการจำลองสำหรับเซ็นเซอร์ และแบบจำลองพลศาสตร์ของยานยนต์ รวมถึงซอฟต์แวร์การจัดการการทดสอบ ส่วนการจัดตั้งแพลตฟอร์มฮาร์ดแวร์นั้นต้องการตู้จำลองแบบเรียลไทม์ บอร์ดอินเทอร์เฟซ I/O เครื่องจำลองเซ็นเซอร์ เป็นต้น การเลือกส่วนประกอบแพลตฟอร์มฮาร์ดแวร์ส่วนใหญ่ขึ้นอยู่กับตัวเลือกในตลาด เนื่องจาก1การพัฒนาเองอาจเป็นเรื่องยาก
การบูรณาการ HIL:
เลือกเครื่องมือทดสอบที่เหมาะสมตามข้อกำหนดและสร้างสภาพแวดล้อมการทดสอบที่เหมาะสม จากนั้นรวมโมเดลอัลกอริทึมที่เกี่ยวข้องเข้ากับสภาพแวดล้อมการทดสอบเพื่อสร้างระบบวงปิด อย่างไรก็ตาม มีเครื่องมือทดสอบหลากหลายประเภทในท้องตลาดจากผู้ผลิตหลายราย โดยมีมาตรฐานและข้อมูลอินเทอร์เฟซที่แตกต่างกันเมื่อเทียบกับตัวควบคุมที่กำลังทดสอบ ทำให้การบูรณาการค่อนข้างท้าทาย
สถานการณ์ทดสอบ:
สถานการณ์ทดสอบจำเป็นต้องครอบคลุมกรณีการใช้งานส่วนใหญ่ และควรพิจารณาถึงสภาวะที่ไม่สามารถจำลองซ้ำได้ด้วย สัญญาณจากเซ็นเซอร์ต้องสอดคล้องกับสถานการณ์ในโลกแห่งความเป็นจริง ความแม่นยำและความครอบคลุมของการทดสอบเป็นตัวบ่งชี้ที่สำคัญของประสิทธิผลของการทดสอบ HIL
สรุปผลการทดสอบ:
สรุปผลการทดสอบควรประกอบด้วย: 1. สภาพแวดล้อมการทดสอบ ระยะเวลาการทดสอบ เนื้อหาการทดสอบ และบุคลากรที่เกี่ยวข้อง 2. สถิติและการวิเคราะห์ปัญหาที่พบระหว่างการทดสอบ สรุปปัญหาที่ยังแก้ไขไม่ได้ 3. รายงานการทดสอบและการส่งผลลัพธ์ การทดสอบ HIL โดยทั่วไปเป็นแบบอัตโนมัติ โดยต้องทำการตั้งค่าให้เสร็จสมบูรณ์และรอให้การทดสอบเสร็จสิ้นเท่านั้น ซึ่งช่วยเพิ่มประสิทธิภาพการทดสอบและรับประกันความสม่ำเสมอ
ติดต่อเรา:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
วันที่โพสต์: 9 ตุลาคม 2566



