



4. ฟังก์ชันซอฟต์แวร์หลักของ BMS
l ฟังก์ชันการวัด
(1) การวัดข้อมูลพื้นฐาน: การตรวจสอบแรงดันแบตเตอรี่ สัญญาณกระแส และอุณหภูมิของชุดแบตเตอรี่ หน้าที่พื้นฐานที่สุดของระบบจัดการแบตเตอรี่คือการวัดแรงดัน กระแส และอุณหภูมิของเซลล์แบตเตอรี่ ซึ่งเป็นพื้นฐานของการคำนวณและตรรกะควบคุมระดับสูงสุดทั้งหมดของระบบจัดการแบตเตอรี่
(2) การตรวจจับความต้านทานฉนวน: ระบบแบตเตอรี่ทั้งหมดและระบบแรงดันสูงจำเป็นต้องได้รับการทดสอบความต้านทานฉนวนโดยระบบจัดการแบตเตอรี่
(3) การตรวจจับการล็อกแรงดันสูง (HVIL): ใช้เพื่อยืนยันความสมบูรณ์ของระบบแรงดันสูงทั้งหมด เมื่อความสมบูรณ์ของวงจรระบบแรงดันสูงเสียหาย มาตรการความปลอดภัยจะถูกเปิดใช้งาน
ลฟังก์ชันการประมาณค่า
(1) การประมาณค่า SOC และ SOH: ส่วนหลักและส่วนที่ยากที่สุด
(2) การปรับสมดุล: ปรับความไม่สมดุลของ SOC x ความจุระหว่างโมโนเมอร์ผ่านวงจรปรับสมดุล
(3) ข้อจำกัดด้านพลังงานแบตเตอรี่: พลังงานขาเข้าและขาออกของแบตเตอรี่มีข้อจำกัดที่อุณหภูมิ SOC ที่แตกต่างกัน
ลฟังก์ชันอื่นๆ
(1) การควบคุมรีเลย์: รวมถึงเมน +, เมน -, รีเลย์ชาร์จ +, รีเลย์ชาร์จ -, รีเลย์ชาร์จล่วงหน้า
(2) การควบคุมอุณหภูมิ
(3) ฟังก์ชันการสื่อสาร
(4) การวินิจฉัยข้อผิดพลาดและการแจ้งเตือน
(5) การทำงานที่ทนต่อความผิดพลาด
5.ฟังก์ชันซอฟต์แวร์หลักของ BMS
ลฟังก์ชันการวัด
(1) การวัดข้อมูลพื้นฐาน: การตรวจสอบแรงดันแบตเตอรี่ สัญญาณกระแส และอุณหภูมิของชุดแบตเตอรี่ หน้าที่พื้นฐานที่สุดของระบบจัดการแบตเตอรี่คือการวัดแรงดัน กระแส และอุณหภูมิของเซลล์แบตเตอรี่ ซึ่งเป็นพื้นฐานของการคำนวณและตรรกะควบคุมระดับสูงสุดทั้งหมดของระบบจัดการแบตเตอรี่
(2) การตรวจจับความต้านทานฉนวน: ระบบแบตเตอรี่ทั้งหมดและระบบแรงดันสูงจำเป็นต้องได้รับการทดสอบความต้านทานฉนวนโดยระบบจัดการแบตเตอรี่
(3) การตรวจจับการล็อกแรงดันสูง (HVIL): ใช้เพื่อยืนยันความสมบูรณ์ของระบบแรงดันสูงทั้งหมด เมื่อความสมบูรณ์ของวงจรระบบแรงดันสูงเสียหาย มาตรการความปลอดภัยจะถูกเปิดใช้งาน
ลฟังก์ชันการประมาณค่า
(1) การประมาณค่า SOC และ SOH: ส่วนหลักและส่วนที่ยากที่สุด
(2) การปรับสมดุล: ปรับความไม่สมดุลของ SOC x ความจุระหว่างโมโนเมอร์ผ่านวงจรปรับสมดุล
(3) ข้อจำกัดด้านพลังงานแบตเตอรี่: พลังงานขาเข้าและขาออกของแบตเตอรี่มีข้อจำกัดที่อุณหภูมิ SOC ที่แตกต่างกัน
ลฟังก์ชันอื่นๆ
(1) การควบคุมรีเลย์: รวมถึงเมน +, เมน -, รีเลย์ชาร์จ +, รีเลย์ชาร์จ -, รีเลย์ชาร์จล่วงหน้า
(2) การควบคุมอุณหภูมิ
(3) ฟังก์ชันการสื่อสาร
(4) การวินิจฉัยข้อผิดพลาดและการแจ้งเตือน
(5) การทำงานที่ทนต่อความผิดพลาด
6.สถาปัตยกรรมซอฟต์แวร์ BMS
ลการจัดการแรงดันไฟฟ้าสูงและต่ำ
เมื่อเปิดเครื่องตามปกติ BMS จะถูกปลุกโดย VCU ผ่านสัญญาณ 12V แบบต่อตรงหรือสัญญาณ CAN หลังจากที่ BMS ตรวจสอบตัวเองเสร็จสิ้นและเข้าสู่โหมดสแตนด์บาย VCU จะส่งคำสั่งแรงดันสูง และ BMS จะควบคุมการปิดรีเลย์เพื่อเชื่อมต่อแรงดันสูงให้เสร็จสมบูรณ์ เมื่อปิดเครื่อง VCU จะส่งคำสั่งแรงดันต่ำแล้วตัดการเชื่อมต่อการปลุก 12V เมื่อเสียบปืนเพื่อชาร์จในขณะที่เครื่องปิดอยู่ จะสามารถปลุกได้ด้วยสัญญาณ CP หรือ A+
ลการจัดการการชาร์จ
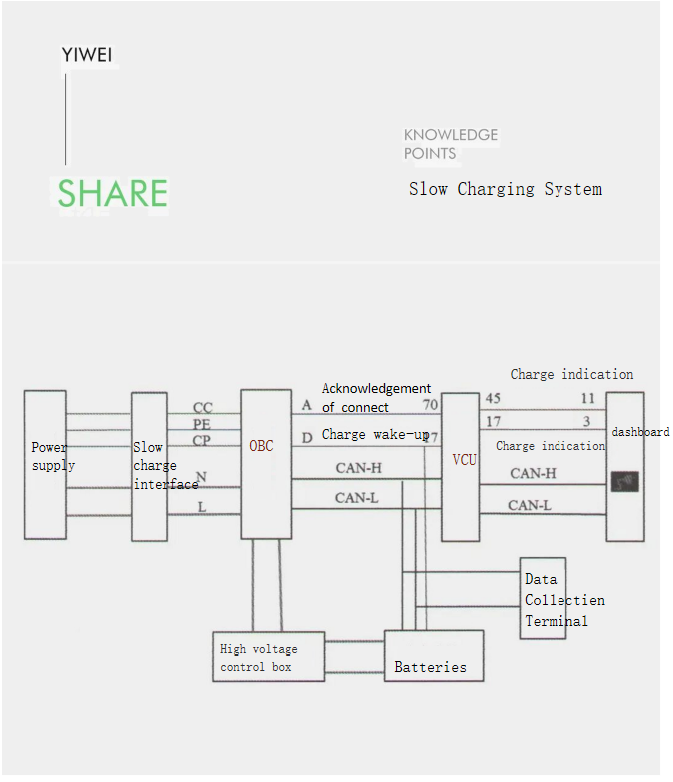
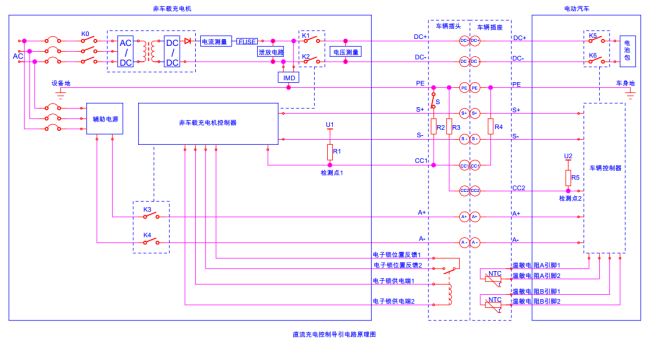
(1) การชาร์จช้า
การชาร์จแบบช้า คือการชาร์จแบตเตอรี่ด้วยกระแสตรงที่แปลงมาจากกระแสสลับโดยใช้เครื่องชาร์จในตัวของแท่นชาร์จ (หรือแหล่งจ่ายไฟ 220V) โดยทั่วไปแล้ว แท่นชาร์จจะมีพิกัดกระแส 16A, 32A และ 64A และยังสามารถชาร์จผ่านแหล่งจ่ายไฟบ้านได้อีกด้วย BMS สามารถปลุกให้ทำงานได้ด้วยสัญญาณ CC หรือ CP แต่ต้องแน่ใจว่าสามารถเข้าสู่โหมดพักการทำงานได้ตามปกติหลังจากชาร์จเสร็จแล้ว กระบวนการชาร์จด้วยกระแสสลับนั้นค่อนข้างง่ายและสามารถพัฒนาได้ตามมาตรฐานแห่งชาติโดยละเอียด
(2) การชาร์จเร็ว
การชาร์จเร็วคือการชาร์จแบตเตอรี่ด้วยกระแสตรงโดยใช้แท่นชาร์จ DC ซึ่งสามารถทำอัตราการชาร์จได้ถึง 1C หรือสูงกว่านั้น โดยทั่วไปแล้วสามารถชาร์จแบตเตอรี่ได้ 80% ภายใน 45 นาที และสามารถปลุกเครื่องได้โดยใช้สัญญาณ A+ จากแหล่งจ่ายไฟเสริมของแท่นชาร์จ
ลฟังก์ชันการประมาณค่า
(1) SOP (State of Power) จะได้รับพลังงานการชาร์จและการคายประจุที่พร้อมใช้งานของแบตเตอรี่ปัจจุบันโดยการค้นหาตารางผ่านอุณหภูมิและ SOC VCU จะกำหนดวิธีการใช้งานยานพาหนะทั้งหมดโดยอิงตามค่าพลังงานที่ส่งมา
(2) SOH (State of Health) ส่วนใหญ่จะบ่งบอกถึงสถานะสุขภาพปัจจุบันของแบตเตอรี่ โดยมีค่าอยู่ระหว่าง 0-100% โดยทั่วไปถือว่าไม่สามารถใช้แบตเตอรี่ได้เมื่อค่าลดลงต่ำกว่า 80%
(3) SOC (State of Charge) เป็นส่วนหนึ่งของอัลกอริธึมควบคุมหลักของ BMS ซึ่งแสดงลักษณะสถานะความจุคงเหลือในปัจจุบัน โดยส่วนใหญ่จะใช้หลักการอินทิกรัลแอมแปร์-ชั่วโมงและอัลกอริธึม EKF (extended Kalman filter) ร่วมกับกลยุทธ์การแก้ไข (เช่น การแก้ไขแรงดันไฟวงจรเปิด การแก้ไขการชาร์จเต็ม การแก้ไขการชาร์จสิ้นสุด การแก้ไขความจุภายใต้อุณหภูมิและ SOH ที่แตกต่างกัน เป็นต้น)
(4) อัลกอริทึม SOE (State of Energy) ยังไม่ได้รับการพัฒนาอย่างกว้างขวางโดยผู้ผลิตในประเทศ หรือใช้อัลกอริทึมที่ค่อนข้างง่ายเพื่อหาอัตราส่วนของพลังงานที่เหลืออยู่ภายใต้สถานะปัจจุบันต่อพลังงานสูงสุดที่มีอยู่ ฟังก์ชันนี้ส่วนใหญ่ใช้สำหรับการประมาณระยะการเดินทางที่เหลืออยู่
ลการวินิจฉัยข้อผิดพลาด
ระดับความผิดพลาดที่แตกต่างกันจะถูกจำแนกตามประสิทธิภาพที่แตกต่างกันของแบตเตอรี่ และระบบจัดการแบตเตอรี่ (BMS) และหน่วยควบคุมแรงดันไฟฟ้า (VCU) จะใช้มาตรการประมวลผลที่แตกต่างกันภายใต้ระดับความผิดพลาดที่แตกต่างกัน เช่น การแจ้งเตือน การจำกัดกำลังไฟ หรือการตัดการเชื่อมต่อแรงดันไฟฟ้าสูงโดยตรง ความผิดพลาดรวมถึงความผิดพลาดในการรับส่งข้อมูลและความสมเหตุสมผล ความผิดพลาดทางไฟฟ้า (เซ็นเซอร์และแอคชูเอเตอร์) ความผิดพลาดในการสื่อสาร และความผิดพลาดเกี่ยวกับสถานะแบตเตอรี่ เป็นต้น
1.ฟังก์ชันซอฟต์แวร์หลักของ BMS
ลฟังก์ชันการวัด
(1) การวัดข้อมูลพื้นฐาน: การตรวจสอบแรงดันแบตเตอรี่ สัญญาณกระแส และอุณหภูมิของชุดแบตเตอรี่ หน้าที่พื้นฐานที่สุดของระบบจัดการแบตเตอรี่คือการวัดแรงดัน กระแส และอุณหภูมิของเซลล์แบตเตอรี่ ซึ่งเป็นพื้นฐานของการคำนวณและตรรกะควบคุมระดับสูงสุดทั้งหมดของระบบจัดการแบตเตอรี่
(2) การตรวจจับความต้านทานฉนวน: ระบบแบตเตอรี่ทั้งหมดและระบบแรงดันสูงจำเป็นต้องได้รับการทดสอบความต้านทานฉนวนโดยระบบจัดการแบตเตอรี่
(3) การตรวจจับการล็อกแรงดันสูง (HVIL): ใช้เพื่อยืนยันความสมบูรณ์ของระบบแรงดันสูงทั้งหมด เมื่อความสมบูรณ์ของวงจรระบบแรงดันสูงเสียหาย มาตรการความปลอดภัยจะถูกเปิดใช้งาน
ลฟังก์ชันการประมาณค่า
(1) การประมาณค่า SOC และ SOH: ส่วนหลักและส่วนที่ยากที่สุด
(2) การปรับสมดุล: ปรับความไม่สมดุลของ SOC x ความจุระหว่างโมโนเมอร์ผ่านวงจรปรับสมดุล
(3) ข้อจำกัดด้านพลังงานแบตเตอรี่: พลังงานขาเข้าและขาออกของแบตเตอรี่มีข้อจำกัดที่อุณหภูมิ SOC ที่แตกต่างกัน
ลฟังก์ชันอื่นๆ
(1) การควบคุมรีเลย์: รวมถึงเมน +, เมน -, รีเลย์ชาร์จ +, รีเลย์ชาร์จ -, รีเลย์ชาร์จล่วงหน้า
(2) การควบคุมอุณหภูมิ
(3) ฟังก์ชันการสื่อสาร
(4) การวินิจฉัยข้อผิดพลาดและการแจ้งเตือน
(5) การทำงานที่ทนต่อความผิดพลาด
2.สถาปัตยกรรมซอฟต์แวร์ BMS
ลการจัดการแรงดันไฟฟ้าสูงและต่ำ
เมื่อเปิดเครื่องตามปกติ BMS จะถูกปลุกโดย VCU ผ่านสัญญาณ 12V แบบต่อตรงหรือสัญญาณ CAN หลังจากที่ BMS ตรวจสอบตัวเองเสร็จสิ้นและเข้าสู่โหมดสแตนด์บาย VCU จะส่งคำสั่งแรงดันสูง และ BMS จะควบคุมการปิดรีเลย์เพื่อเชื่อมต่อแรงดันสูงให้เสร็จสมบูรณ์ เมื่อปิดเครื่อง VCU จะส่งคำสั่งแรงดันต่ำแล้วตัดการเชื่อมต่อการปลุก 12V เมื่อเสียบปืนเพื่อชาร์จในขณะที่เครื่องปิดอยู่ จะสามารถปลุกได้ด้วยสัญญาณ CP หรือ A+
ลการจัดการการชาร์จ
(1) การชาร์จช้า
การชาร์จแบบช้า คือการชาร์จแบตเตอรี่ด้วยกระแสตรงที่แปลงมาจากกระแสสลับโดยใช้เครื่องชาร์จในตัวของแท่นชาร์จ (หรือแหล่งจ่ายไฟ 220V) โดยทั่วไปแล้ว แท่นชาร์จจะมีพิกัดกระแส 16A, 32A และ 64A และยังสามารถชาร์จผ่านแหล่งจ่ายไฟบ้านได้อีกด้วย BMS สามารถปลุกให้ทำงานได้ด้วยสัญญาณ CC หรือ CP แต่ต้องแน่ใจว่าสามารถเข้าสู่โหมดพักการทำงานได้ตามปกติหลังจากชาร์จเสร็จแล้ว กระบวนการชาร์จด้วยกระแสสลับนั้นค่อนข้างง่ายและสามารถพัฒนาได้ตามมาตรฐานแห่งชาติโดยละเอียด
(2) การชาร์จเร็ว
การชาร์จเร็วคือการชาร์จแบตเตอรี่ด้วยกระแสตรงโดยใช้แท่นชาร์จ DC ซึ่งสามารถทำอัตราการชาร์จได้ถึง 1C หรือสูงกว่านั้น โดยทั่วไปแล้วสามารถชาร์จแบตเตอรี่ได้ 80% ภายใน 45 นาที และสามารถปลุกเครื่องได้โดยใช้สัญญาณ A+ จากแหล่งจ่ายไฟเสริมของแท่นชาร์จ
ลฟังก์ชันการประมาณค่า
(1) SOP (State of Power) จะได้รับพลังงานการชาร์จและการคายประจุที่พร้อมใช้งานของแบตเตอรี่ปัจจุบันโดยการค้นหาตารางผ่านอุณหภูมิและ SOC VCU จะกำหนดวิธีการใช้งานยานพาหนะทั้งหมดโดยอิงตามค่าพลังงานที่ส่งมา
(2) SOH (State of Health) ส่วนใหญ่จะบ่งบอกถึงสถานะสุขภาพปัจจุบันของแบตเตอรี่ โดยมีค่าอยู่ระหว่าง 0-100% โดยทั่วไปถือว่าไม่สามารถใช้แบตเตอรี่ได้เมื่อค่าลดลงต่ำกว่า 80%
(3) SOC (State of Charge) เป็นส่วนหนึ่งของอัลกอริธึมควบคุมหลักของ BMS ซึ่งแสดงลักษณะสถานะความจุคงเหลือในปัจจุบัน โดยส่วนใหญ่จะใช้หลักการอินทิกรัลแอมแปร์-ชั่วโมงและอัลกอริธึม EKF (extended Kalman filter) ร่วมกับกลยุทธ์การแก้ไข (เช่น การแก้ไขแรงดันไฟวงจรเปิด การแก้ไขการชาร์จเต็ม การแก้ไขการชาร์จสิ้นสุด การแก้ไขความจุภายใต้อุณหภูมิและ SOH ที่แตกต่างกัน เป็นต้น)
(4) อัลกอริทึม SOE (State of Energy) ยังไม่ได้รับการพัฒนาอย่างกว้างขวางโดยผู้ผลิตในประเทศ หรือใช้อัลกอริทึมที่ค่อนข้างง่ายเพื่อหาอัตราส่วนของพลังงานที่เหลืออยู่ภายใต้สถานะปัจจุบันต่อพลังงานสูงสุดที่มีอยู่ ฟังก์ชันนี้ส่วนใหญ่ใช้สำหรับการประมาณระยะการเดินทางที่เหลืออยู่
ลการวินิจฉัยข้อผิดพลาด
ระดับความผิดพลาดที่แตกต่างกันจะถูกจำแนกตามประสิทธิภาพที่แตกต่างกันของแบตเตอรี่ และระบบจัดการแบตเตอรี่ (BMS) และหน่วยควบคุมแรงดันไฟฟ้า (VCU) จะใช้มาตรการประมวลผลที่แตกต่างกันภายใต้ระดับความผิดพลาดที่แตกต่างกัน เช่น การแจ้งเตือน การจำกัดกำลังไฟ หรือการตัดการเชื่อมต่อแรงดันไฟฟ้าสูงโดยตรง ความผิดพลาดรวมถึงความผิดพลาดในการรับส่งข้อมูลและความสมเหตุสมผล ความผิดพลาดทางไฟฟ้า (เซ็นเซอร์และแอคชูเอเตอร์) ความผิดพลาดในการสื่อสาร และความผิดพลาดเกี่ยวกับสถานะแบตเตอรี่ เป็นต้น
ติดต่อเรา:
yanjing@1vtruck.com +(86)13921093681
duanqianyun@1vtruck.com +(86)13060058315
liyan@1vtruck.com +(86)18200390258
วันที่โพสต์: 12 พฤษภาคม 2566



